NTP - driver 22 versus 28
Here I want to share some information about different drivers for NTP daemon
To run a GPS disciplined NTP server one has to us a so called driver. There are several different possibilities to achieve this goal. I decided to use driver 22 and driver 28. But it’s also possible to use only one or the other. (Or to go with a different solution)
Driver 22 - PPS Clock Discipline
Driver 22 needs at least one preferred source. In my case it’s driver 28 but it could be as well any other “remote” NTP server.
As you can see offset is typically within a range of +/- 10 μs.
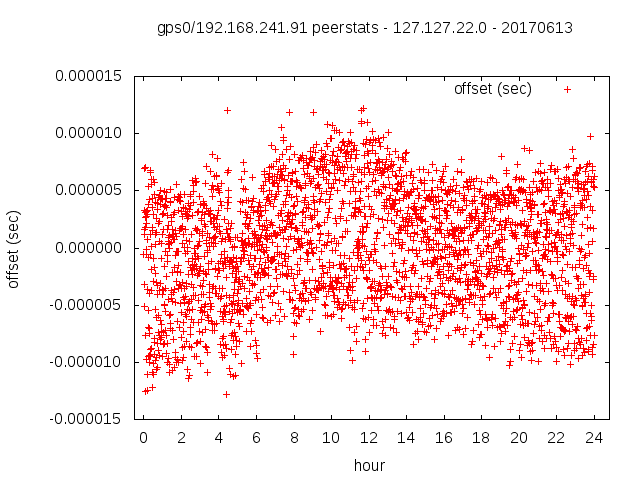
See also: https://www.eecis.udel.edu/~mills/ntp/html/drivers/driver22.html
Driver 22 does the ticks. This driver is configured wiht “maxpoll 5”.
Driver 28 - Shared Memory Driver
Driver 28 is used to do the “second numbering”. The information is coming over a serial interface. Therefore it’s more or less a random situation when the time information is delivered. And we can see driver 28 is far away to be so accurate as driver 22.
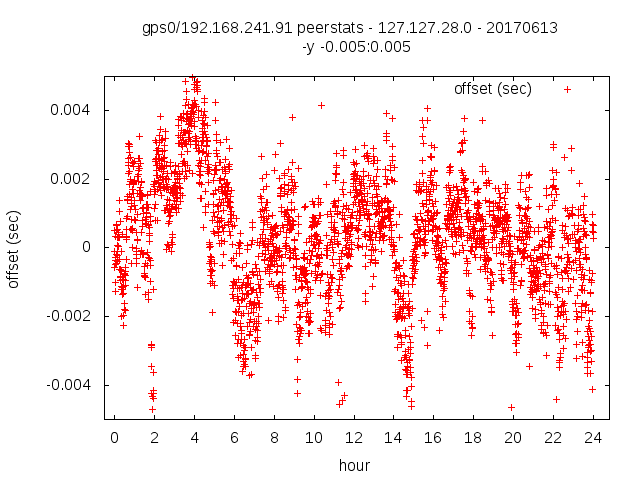
See also: https://www.eecis.udel.edu/~mills/ntp/html/drivers/driver28.html
Disadvantage
If connectivity to the satellites is lost and finally available the NTP daemon starts to synchronize with the preferred server (28). This pulls the server away from the real time even if the free running server wouldn’t be so bad.
Output
This is rhe result of “ntpq -pn -W 80” running NTPsec
remote refid st t when poll reach delay offset jitter
===============================================================================
oPPS(0) .PPS. 0 u 3 32 377 0.0000 -0.0033 0.0040
*SHM(0) .GPS. 0 u 2 32 377 0.0000 0.4335 0.7495